- ホーム
- CASE STUDY
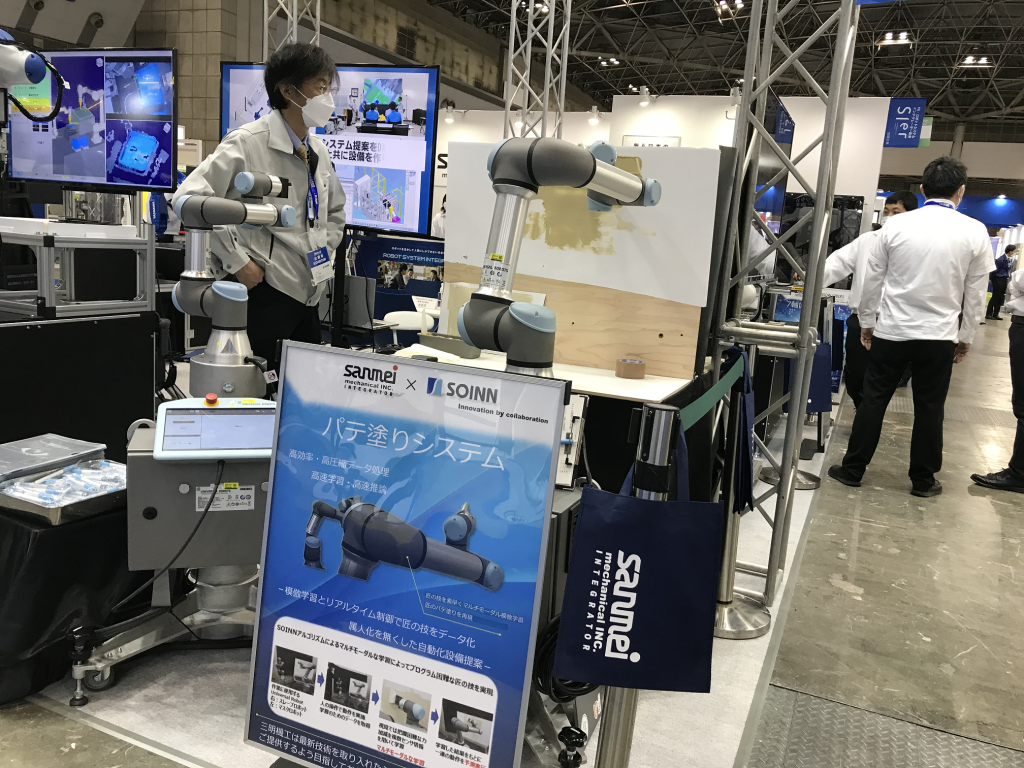
- 【ロボット制御】SOINN®2.0を用いたパテ塗り作業デモ
【ロボット制御】SOINN®2.0を用いたパテ塗り作業デモ
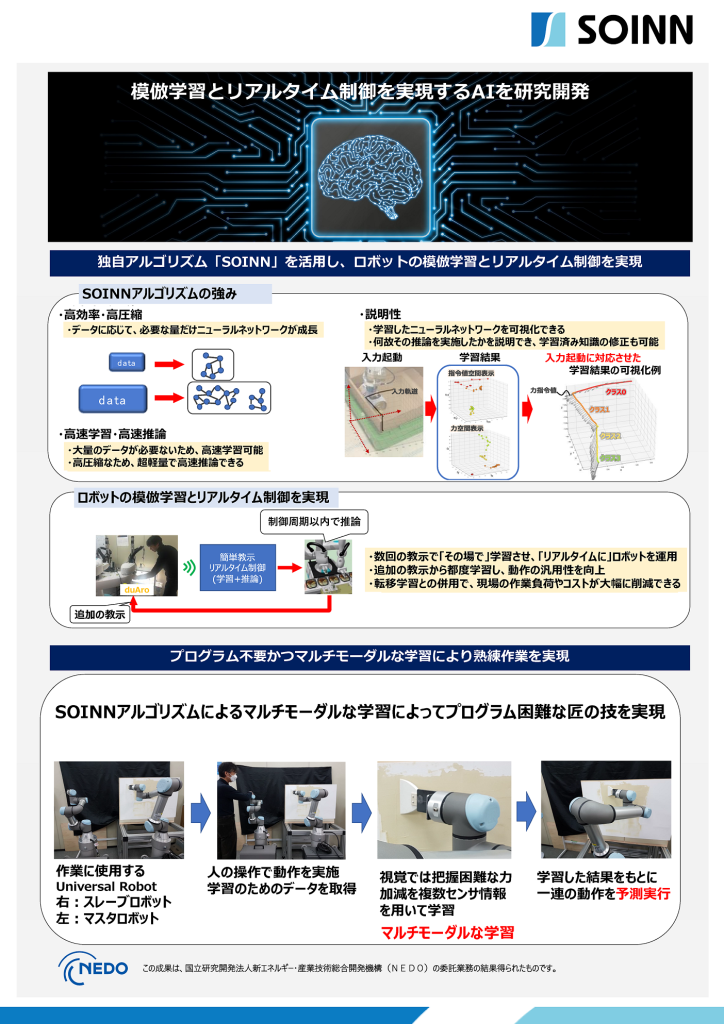
一般に、反力や摩擦力が動的に変化する環境下でのロボット制御は、プログラミングが非常に困難です。そこで本デモでは、反力や摩擦力がある環境下で人が操作した履歴をSOINN🄬2.0 に学習させることで、ロボットに同等の力制御タスクをリアルタイム実行させることとしました。
デモの概要は以下の通りです。
① UR3eをマスタ、UR5eをスレーブに設定する。
② 人がマスタをもってパテ塗り作業を行い、その過程で得られた動作と力触覚のセンサデータを学習データとする。
③ 学習データを SOINN🄬2.0 に与えて学習させ、ロボットに一連の動作を実行させる。
本デモの基幹技術は、NEDO プロジェクト(※)の一環として開発したものです。
詳細は、以下の資料やポスター、ビデオをご参照ください。
2022 国際ロボット展 会場配布資料(PDF) ダウンロード