- ホーム
- SERVICE&PRODUCT
- CASE STUDY
CASE STUDY
本ページでは、SOINN 社の AI 開発実績のうち、公開可能な事例をご紹介いたします(順不同)。
【AIチップ】 AIチップ・次世代コンピューティングの技術開発
2017年度より、下記のNEDO(国立研究開発法人新エネルギー産業技術総合開発機構)プロジェクトの一環として、ルネサスエレクトロニクス様、東京工業大学様、三菱電機様とともに、SOINN を活用したエッジAI技術の研究開発を行っています。当社はこのプロジェクトで SOINN の新技術である SOINN 2.0 の開発と、その DRP チップへの実装を進めています。
また成果物の有力な展開先候補としてロボットを選定し、実証実験を進めるとともに、展示会でのデモ展示などアウトリーチ活動も積極的に進めています。
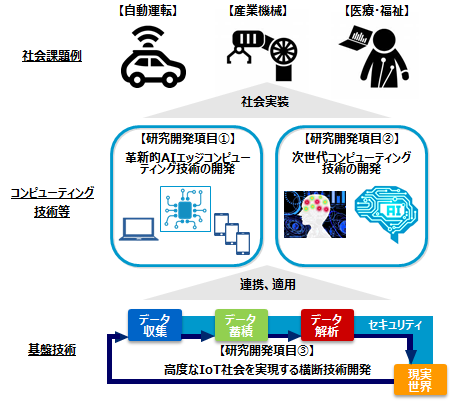
高効率・高速処理を可能とするAIチップ・次世代コンピューティングの技術開発
【研究開発項目①】革新的AIエッジコンピューティング技術の開発
動的再構成技術を活用した組込みAIシステムの研究開発
競合学習機構による汎用・超軽量エンドポイント学習技術の開発
<NEDOプロジェクトページ>
・高効率・高速処理を可能とするAIチップ・次世代コンピューティングの技術開発
<デモ展示情報>
・メカトロテックジャパン2021
【自動運転AI】 AI制御によるクローラキャリアの自動走行技術の開発
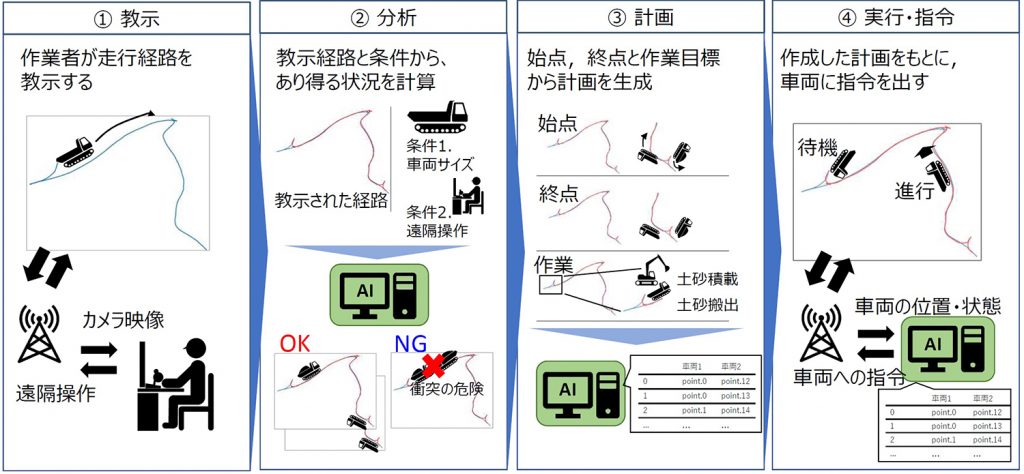
株式会社熊谷組様と共同で、不整地運搬車を自動で走行させる「AI制御による不整地運搬車(クローラキャリア)の自動走行技術」を開発しました。これにより不整地運搬車の安全性の向上とオペレーター一人による複数台の運転管理で生産性の向上を図ることができます。
詳細は、熊谷組様プレスリリースページをご参照ください(クリックで遷移します)。
<メディア記事>
・熊谷組が複数台の“クローラーキャリア”をAIで制御、阿蘇大橋の土砂運搬に導入
・熊谷組、クローラキャリアの自動走行技術を確立

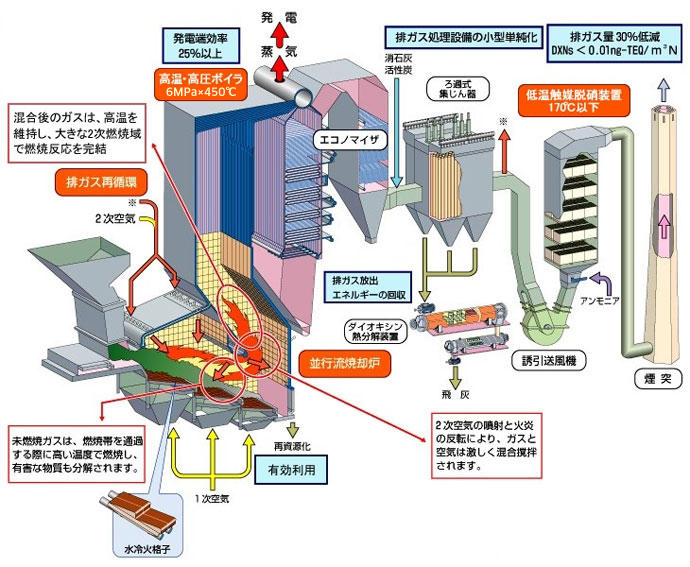
【プラント制御AI】 ごみ焼却施設の運転支援 AI の開発
川崎重工業株式会社様と共同で、ごみ焼却施設の運転支援AIを開発しています。詳細は、以下のメディア記事や論文をご参照ください。
<メディア記事>
・川崎重工、ごみ処理発電にAI 20年代に無人化
<学術論文>
・AIを活用したごみ焼却施設の運転支援システムの評価について
・ごみ焼却施設における AI を活用した燃焼映像認識技術
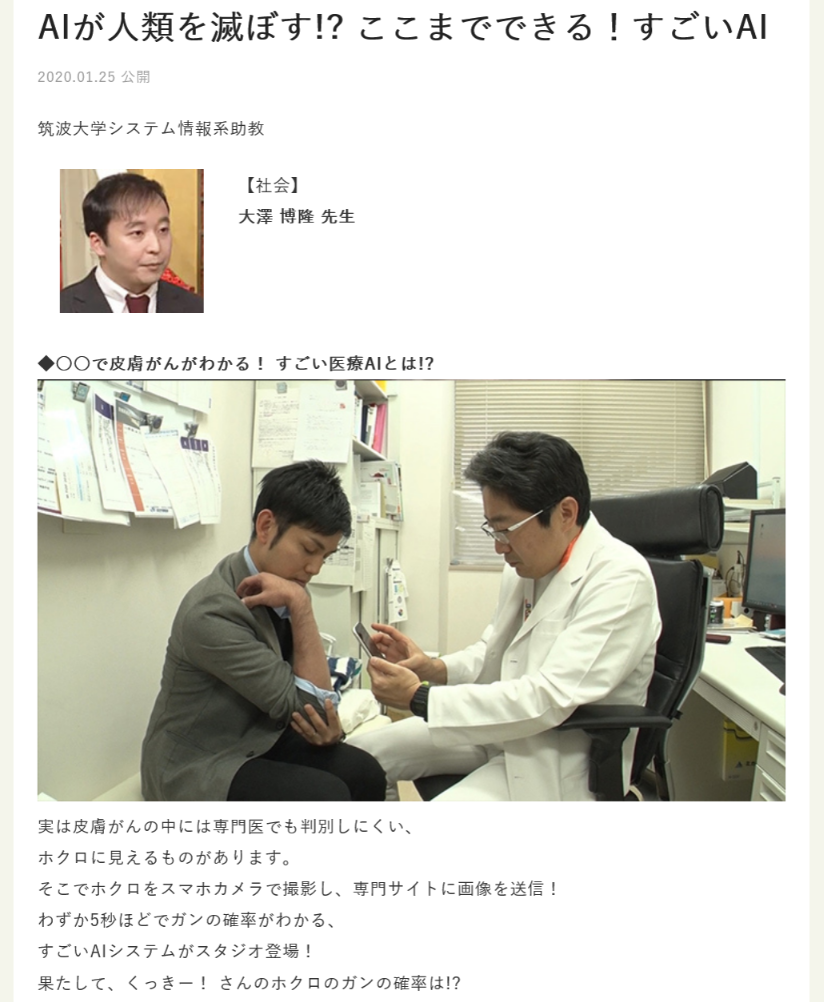
【医療用画像AI】 皮膚腫瘍診断支援 AI の開発
筑波大学付属病院様、生命科学インスティテュート様とともに、皮膚腫瘍診断支援 AI を開発しました。スマホで撮影した画像から、皮膚がんリスクを推定して医師の判断を支援します。このAIは、2020年1月放送の日本テレビ系列「世界一受けたい授業」にて紹介されました。
<TV放映>
・「世界一受けたい授業」番組 Web ページ
【インフラ点検AI】 舗装路面下空洞探査 AI の開発
応用地質株式会社とともに、地中レーダー画像からの路面下空洞探査 AI を開発しました。<学術論文>
・機械学習を用いた地中レーダによる舗装道路下空洞箇所の自動抽出の試み
